Design and Simulation of Electroactive Polymer-Based Artificial Muscles for Biomedical Application
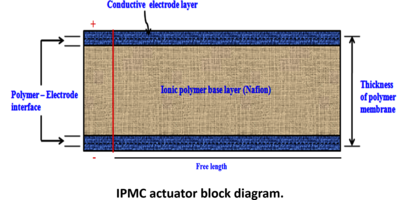
Electro-active polymer (EAP) based actuators are one of the suitable contenders for use in artificial muscles based bio-medical application because of their bio compatibility and lower active actuation voltage requirement phenomenon. At present Ionic polymer metal composites (IPMC), a type of EAP based actuator are being developed for various applications. IPMC actuator generally consist sandwiched ionic polymer (Nafion) layer between two metal electrodes. Nafion, a perfluorosulfonated based ionic polymer, having both hydrophilic (sulfonated side chains) as well as hydrophobic (teflon backbone) region is an attractive choice of material for developing the actuators. Hydrophilic region absorbs water based electrolyte having positive and negative ionic charges, for example diluted ions such as Li+ & Cl- , Na+ & Cl- helps in ion migration and provides good proton conductivity. Teflon backbone helps to provide stability to Nafion membrane at high temperature ambient. Due to applied electric field in IPMC, ionic current is produced, which helps to migrate the hydrated cations towards cathode, causing change in osmotic pressure near the electrodes region (contraction and swelling near the anode–cathode respectively), resulting in bending of the IPMC actuator towards the anode. In this paper we did transient study to examine the electromechanical response of IPMC actuator based on applied voltage.
Download
- tripathi_poster.pdf - 1.27MB
- tripathi_abstract.pdf - 0.68MB