The Counterintuitive Physics Behind Magnetically Levitated Hoverboards
The following set of COMSOL® simulations were a vital part of a multi-year-long research project about magnetically levitated hoverboards. A hoverboard can be seen as a small skateboard, that uses magnetic a set of hover-thrusters instead of wheels. A total of nine working prototype iterations were constructed, heavily influenced by the results of the simulations.
The magnetic levitation is created by arranging a set of magnets into the so-called Stabilized Halbach Array and being rotated above a sheet of a non-ferromagnetic metal (see Figure 1). The movement of the magnetic field induces eddy currents within the metal, which themselves create an opposing magnetic field. The latter magnetic field is dynamic and creates a stable state of levitation for the magnets above. Using the Stabilized Halbach Array for this type of levitation is a novel idea based on the German patent (DE102018002179A1) and has the defining feature, that the array is easily scalable in size without the development of destructive internal forces between individual magnets. Researching levitation based on this array has potential implications for Maglev trains and designs of magnetic bearings.
In order to simulate the Forces between the magnetic array and the metallic ground, two similar COMSOL® models were created. The first model utilizes the (mef)-interface from the AC/DC Module to create results in a quasistatic setup. The geometry from the magnets were assigned with a magnetization and the metallic plate was provided with a Lorentz-Term, that corresponded with a rotational motion. For time depended studies, the rotating machinery interface was utilized with a moving mesh. A large set of parametric sweeps accompanied most simulations, in order to better understand the effects of parameters like the height of the levitation, strength of the magnets, speed of the rotation and the angle by which the magnetic array is tilted. Global Evaluations provided a convenient read-out system for any generated force and torque of interest. Occasionally, the Heat Transfer Module was used to simulate the electromagnetic heating and calculate the efficiency.
Studying the relation between the tilting angle of the magnetic array and the resulting forces was essential to develop a thrust-vector control system for the hoverboards. The relationship between the angle and the forces is nonlinear and would be very difficult to figure out experimentally, due to the extreme sensitivity of the system. Simulations like in Figure 2 allowed us to understand the behavior of the forces and map the hoverboard software control system accordingly. The simulated vertical and horizontal forces on the disc are shown in Figure 3.
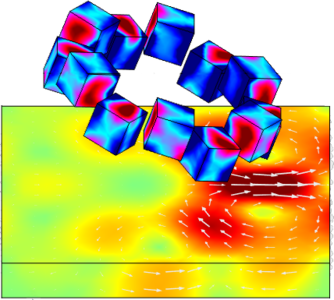
The visualization of the eddy currents in different configurations enabled us to understand the individual contributions of different eddy currents. A set of simulations were performed with constrained metal geometries (see Figure 4), to develop an understanding. Counter to intuition, if a hover-thruster is tilted forward, the thrust-vector does not tilt forward, but 90 degrees sideways. With the help of the eddy current visualization and isolation, we found an explanation for this phenomenon.
Download
- Korocencev_6661_poster.pdf - 0.68MB