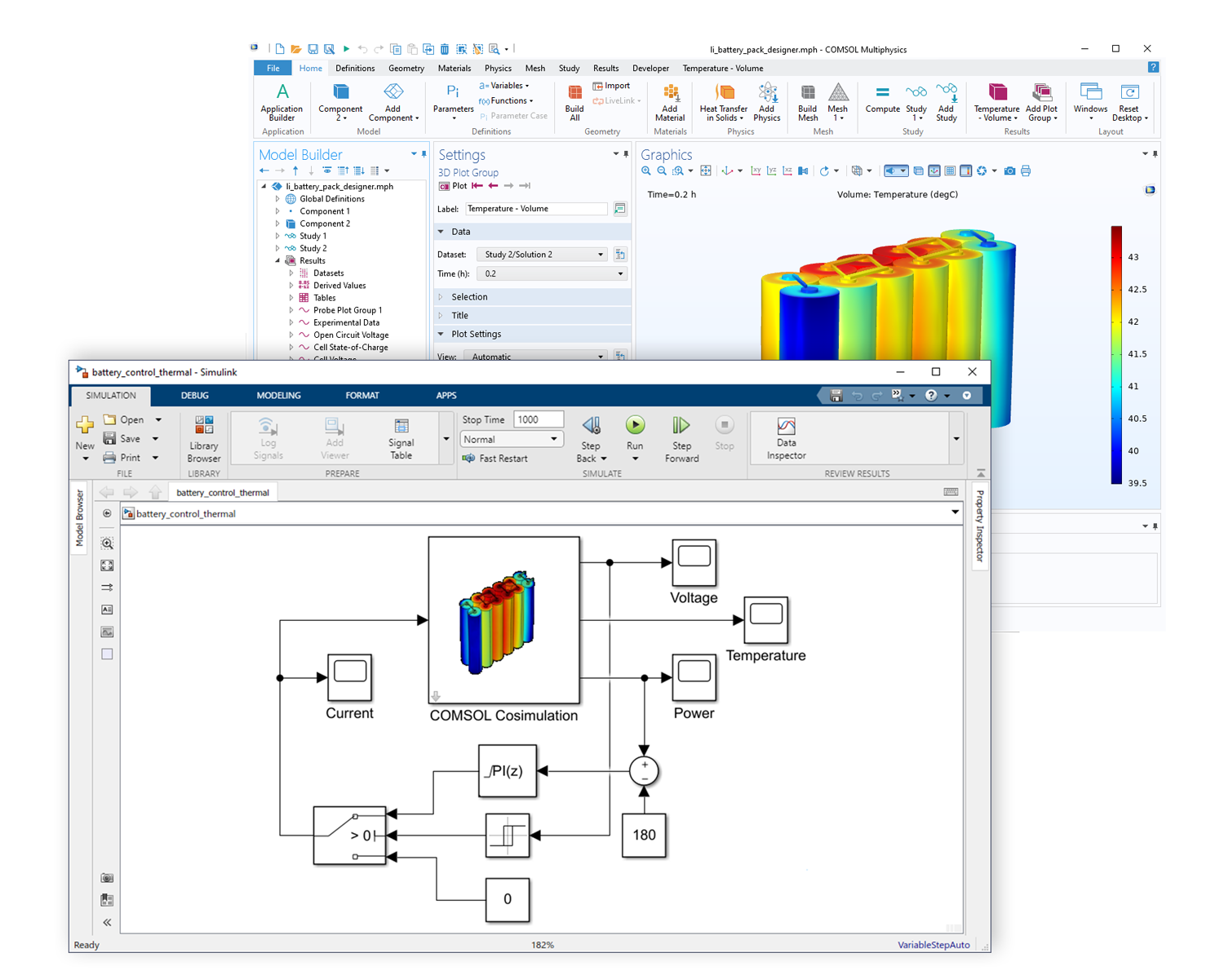
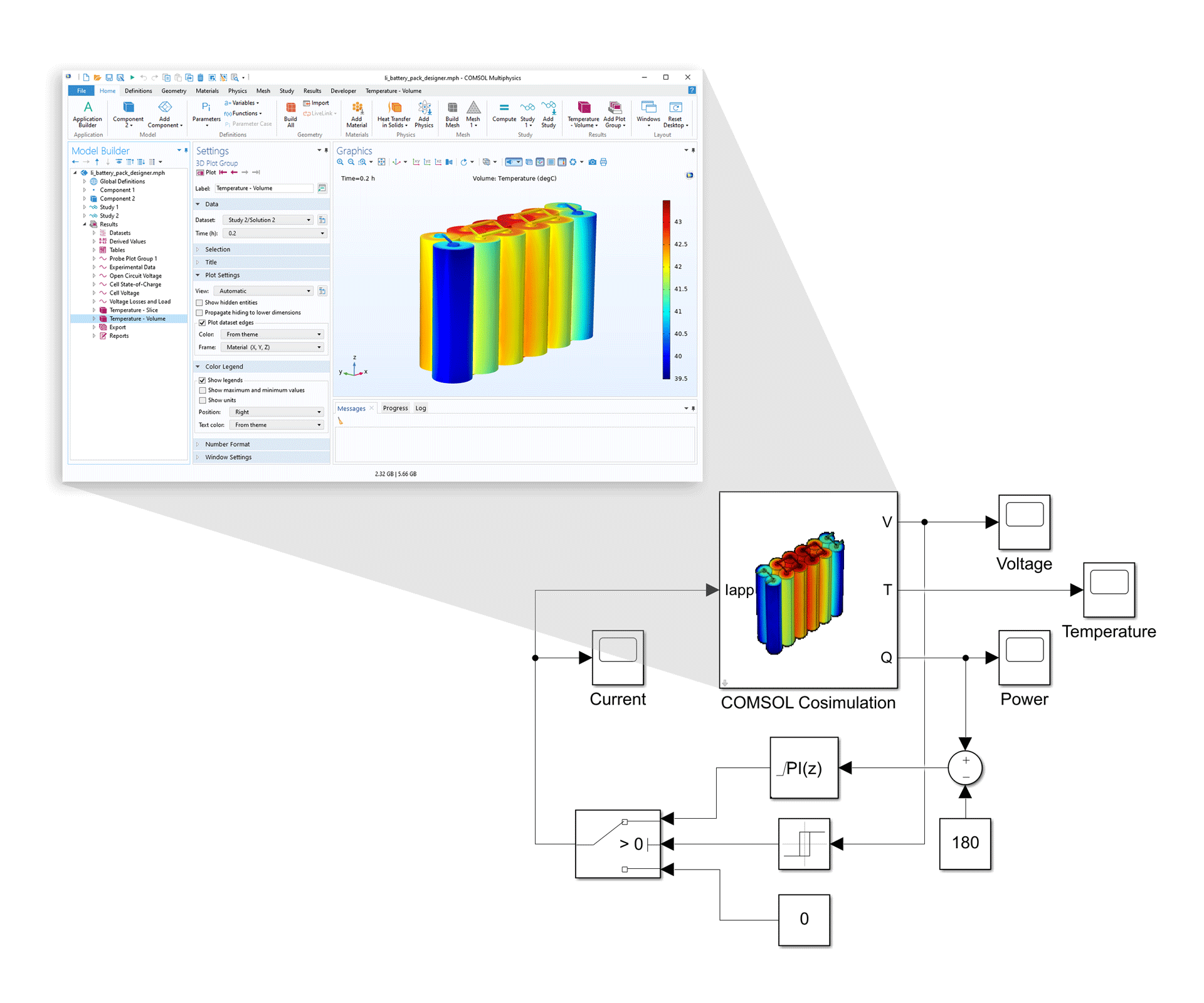
Temperature Control of a Battery Pack
LiveLink™ for Simulink® is useful for temperature control simulation, as demonstrated in the example model called Battery Pack Discharge Control with Thermal Analysis. Thermal management is important in battery modeling. The cosimulation computes the temperature distribution in a battery pack during discharge. The pack is modeled in COMSOL Multiphysics® and the Battery Design Module. This particular battery pack configuration is common in portable devices like skateboards, toys, drones, and medical equipment. The electric current of the 3D battery model is controlled in Simulink® to ensure constant power during usage.